光线追踪
原创2025/5/28大约 3 分钟
Whitted-Style Ray Tracing
Whitted-Style 递归算法
是以相机为原点,向屏幕中的每一个像素画一条射线
射线打到物体上后,根据物体的特性,进行额外的反射或折射计算(代表射线可能会有多次弹射)
最终再射向光源,以确认光照性的一个过程
这个算法,利用了光路可逆性,以摄像机为起点,对每一个像素方向进行一个射线检测(模拟光路),以此来确定像素的颜色
光线追踪可以实现,普通光栅化渲染流程无法实现的,体现物体与物体之间相互影响的关系
所以首先需要的是,射线与物体之间的交点计算
对于一般性的隐式表面
射线的定义
隐式表面方程
交点
对于 Polygon Mesh 的显式表面
对于一个由三角形构成的模型而言,我们需要判断的是,射线是否相交于三角形
射线与三角形的相交判断
分为两个步骤
- 射线于三角形所在面的交点
- 该交点是否在三角形内(方法已知,循环叉乘判断左右)
对于第一个步骤而言,我们需要先确定的是如何定义一个平面
- 平面的法线方向
- 平面上的任意一点
对于在平面上的任意点
射线的定义
由此可得
至此,就得到了射线于平面的交点
接下来对焦点做三角形内判断即可
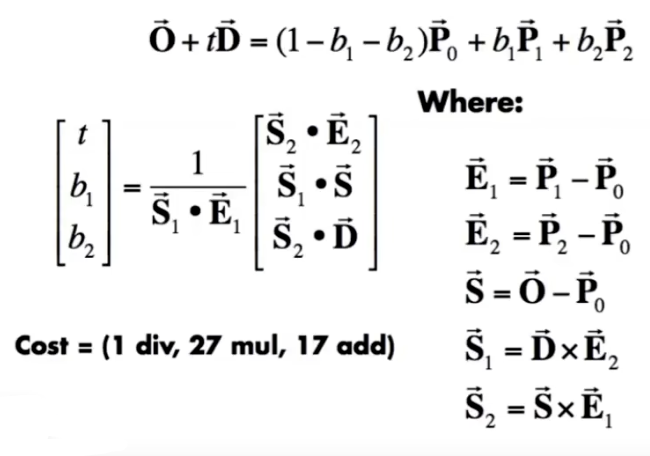
Möller Trumbore Algorithm
射线三角形求交公式
加速
单根射线遍历三角形的运算量过于巨大,可以通过构建包围盒来预剔除一些不可能与射线交互的物体
Axis-Aligned Bounding Box(AABB)
轴对齐包围盒
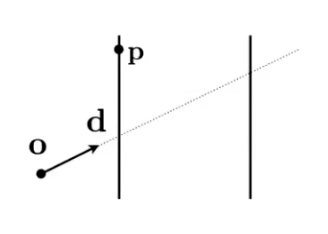
射线的定义
对于单轴(X轴举例)而言
与AABB在X轴上的交点,处于
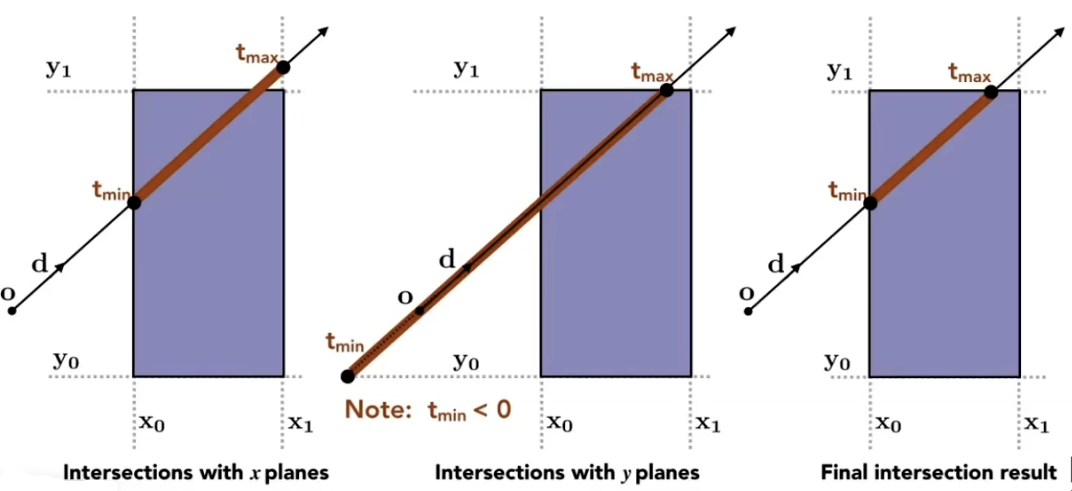
随后对三个轴都进行一次操作,每个轴都会与轴平面相交两次
得到
做交集得出:
最后满足条件
即视为射线与物体有可能相交
空间划分 Spatial Partitioning
- Oct-Tree 八叉树
- KD-Tree KD树
- BSP-Tree BSP树
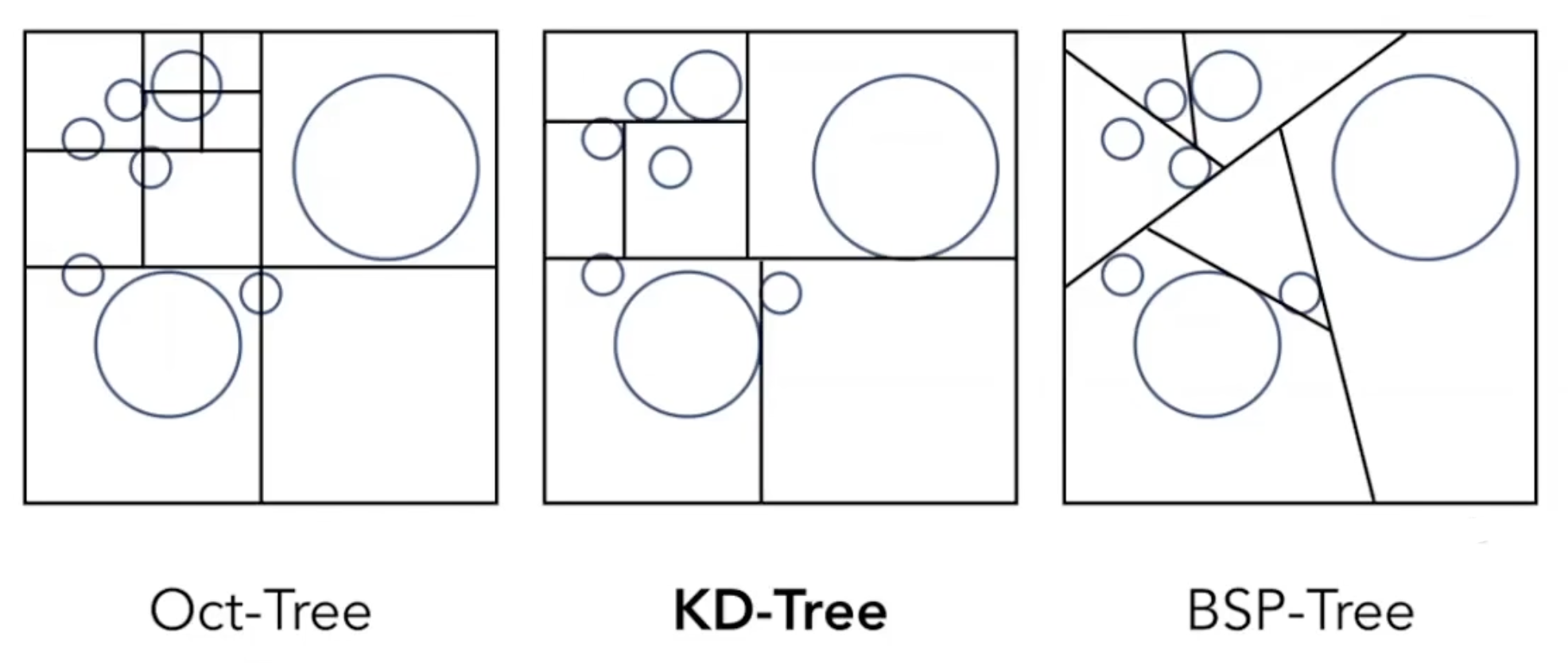
这个并不深究,因为这个算法已经过时了
物体划分 Object Partitioning
- BVH Bounding Volume Hierarchy
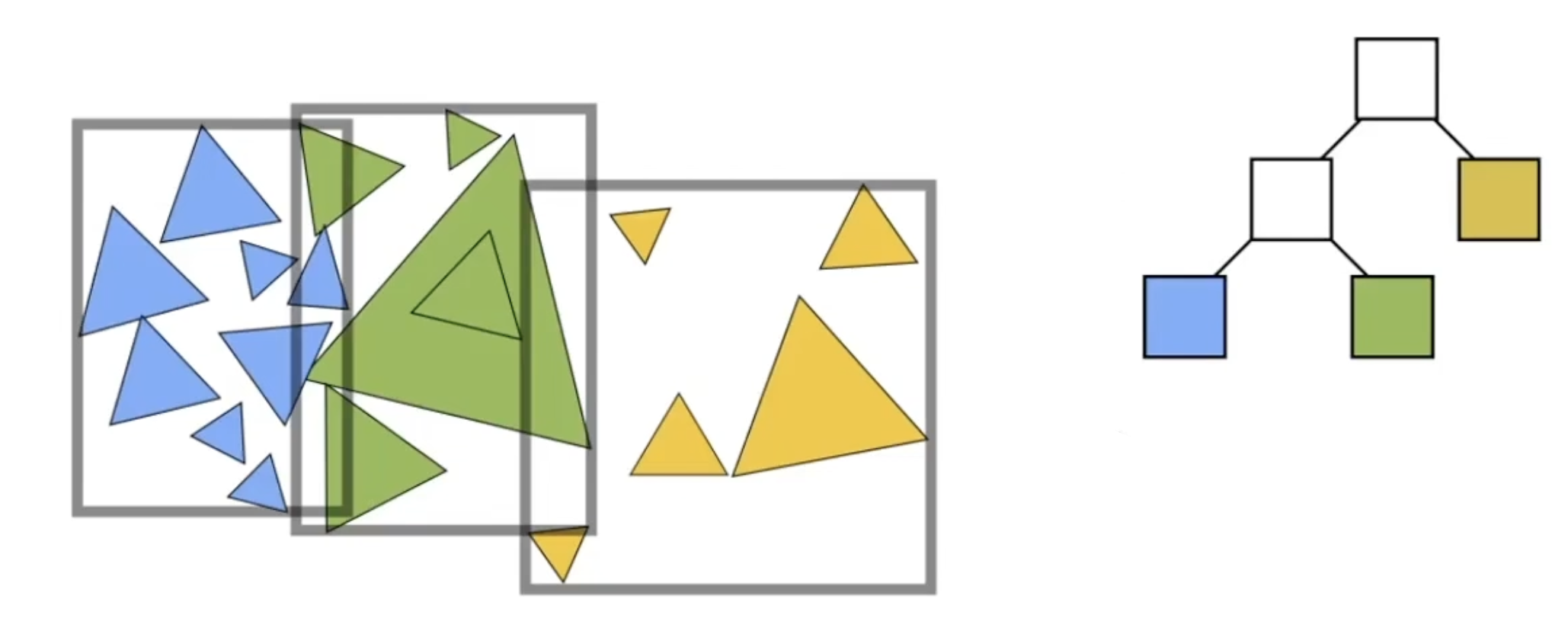
按照物体分堆,均匀的划分空间,形成可重叠的包围盒